


BIMVIP – Building Information Modelling for Visually Impaired People
Die eigenständige Navigation in unbekannten Umgebungen stellt speziell für blinde und sehbeeinträchtigte Menschen eine große Herausforderung dar. Das Projekt soll demonstrieren, wie unbekannte Gebäude gefahrlos und eigenständig vorab durch den Einsatz von Virtual Reality (VR) und Laufband-Tretmühlen begangen werden können.
Projektbeschreibung
Für viele Neubauten erfolgt die Planung in Form von 3D-BIM-Modellen – einer digitalen Simulation, die es erlauben soll, ein Gebäude virtuell zu besichtigen und damit auch ein besseres Gefühl für die Größenverhältnisse zu bekommen, als es ein zweidimensionaler Bauplan erlaubt. Das Projekt „BIMVIP“ (Building Information Modelling for Visually Impaired People) nutzt diese bereits vorhandenen Daten, um Personen mit einer Sehbeeinträchtigung eine virtuelle Vorabbegehung eines ihnen unbekannten Gebäudes zu ermöglichen.
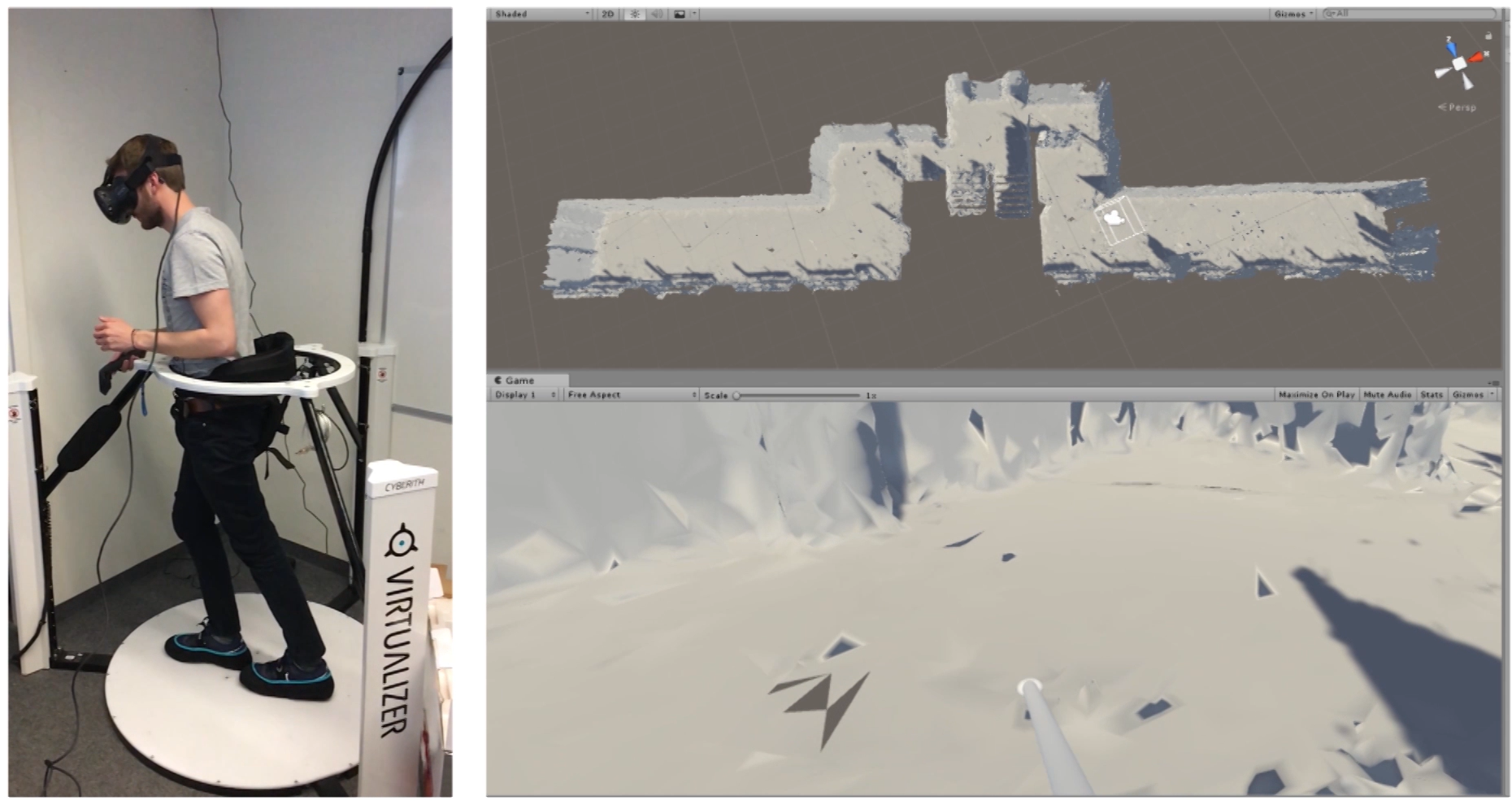
Dabei kommen Techniken zum Einsatz, die einen virtuellen Raum nicht nur optisch simulieren (wie 3D-Brillen), sondern auch haptisches Feedback geben (eine Art „virtueller Blindenstock“). Zudem ist eine buchstäbliche „Begehung“ mit den Füßen durch omnidirektionale Tretmühlen möglich. Die Einsatzmöglichkeiten wurden am Beispiel des Neubaus des Informationszentrums am Campus Keßlerplatz der Technischen Hochschule Nürnberg erprobt. Zur Validierung der anwendungsorientierten Nutzung wurden auch externe Partner*innen eingebunden.

Projektbeteiligte:
-
Prof. Dr. Timo Götzelmann
Technische Hochschule Nürnberg, Fakultät Informatik
-
Prof. Dr. Wolfram Stephan
Technische Hochschule Nürnberg, Fakultät Maschinenbau und Versorgungstechnik
-
Julian Kreimeier
Technische Hochschule Nürnberg, Fakultät Informatik
-
Florian Büttner
Technische Hochschule Nürnberg, Institut für Energie und Gebäude (IEG)
-
Michael Buschbacher
Technische Hochschule Nürnberg, Fakultät Bauingenieurwesen
-
Shila Rastizadeh
Technische Hochschule Nürnberg, Studentische Hilfskraft
-
Pascal Karg
Technische Hochschule Nürnberg, Studentische Hilfskraft