


Robodynamische Diffusion / Moving Speakers
Die Entfaltung der räumlichen Wirkung von Sound steht im Fokus des Projekts „Robodynamische Diffusion / Moving Speakers“. Lautsprecher werden dabei auf Roboterplattformen montiert, die sich über Programmierung oder Fernsteuerung positionieren und ausrichten lassen. Durch die Bewegung der Klangkörper im architektonischen Raum entstehen akustische Reflexionen und Resonanzen: Schallwellen brechen sich an den baulichen Formen und versetzen die Umgebung in Schwingungen, wodurch das Klangergebnis beeinflusst wird. Somit wird der Aufführungsraum selbst Teil des Instruments und aktiv in die Komposition einbezogen.
Über die Bewegung von Sound im Raum
Sound wirkt räumlich. Er ist ein Material, das in alle Richtungen ausstrahlt, sich an Materie bricht, reflektiert wird und die Umgebung in Schwingungen versetzt. Der Einsatz von Sound kann Räume befragen, neu deuten und vorher scheinbar festgeschriebene Wahrnehmungen ins Wanken bringen. Bewegter Klang kann Standpunkte auflösen, Perspektiven umdeuten und neue Bühnenräume schaffen.
Die Entfaltung der räumlichen Wirkung von Sound steht im Fokus des von LEONARDO geförderten Projekts „Robodynamische Diffusion / Moving Speakers“. Die Töne vom Instrument zu entkoppeln und frei im Raum zu bewegen, ist ein Anliegen der elektroakustischen Musik, das der Komponist Karlheinz Stockhausen bereits Mitte des 20. Jahrhunderts äußerte:
„1953/54 haben wir versucht, Lautsprecher an Seile zu hängen und im Saal zu bewegen. Man kann ja nun nicht so einfach einen Trompeter auf einem Stuhl festbinden und ihn im Saal herumschleudern und dabei blasen lassen. Also sucht man andere Möglichkeiten, den Klang alleine in einem Raum zu bewegen, und diese Entwicklung hat gerade erst begonnen. Die Bewegung der Klänge ist also nicht mehr notwendig an den Körper gebunden. Das ist etwas sehr Wichtiges. Daß ich dank der modernen Hilfsmittel Mikrophon, Magnetophon, Lautsprecher nicht mehr die 172 Pfund transportieren muß, wenn meine Stimme irgendwo in der Ferne gehört werden soll. Daß ein Oboist, der vorne links auf einem Podium sitzt, nun immer von da gehört werden soll, wo er sitzt, ist ja nicht unbedingt notwendig. Das wissen wir alle vom Radio und vom Fernsehen. Und sicher werden sich die modernen Mittel immer mehr so entwickeln, daß wir ganz plastische, dreidimensionale Akustik wie auch Optik erleben, ich meine also Klänge überall an beliebigen Punkten im Raum.“ – Karlheinz Stockhausen: Vier Kriterien der Elektronischen Musik, September 1972
Das Kooperationsprojekt überträgt Stockhausens Vorstellung von frei bewegbarem Sound im Raum ins 21. Jahrhundert. Dank moderner Technologien nimmt sie nun reale Formen an. Initiiert von Prof. Jan St. Werner kooperieren die Projektklasse für Interaktive Medien / Dynamische Akustische Forschung (DAF) und die Werkstatt für Interaktive Medien der Akademie der Bildenden Künste Nürnberg mit dem Labor für mobile Robotik der Technischen Hochschule Nürnberg und der Firma Evocortex, um den herkömmlichen Einsatz von Lautsprechern zu überdenken und gemeinsam mobile Lautsprecherobjekte zu entwickeln.
In der Praxis der verstärkten Klangwiedergabe werden Lautsprecher meist so platziert, dass sie an bestimmten Positionen im Raum optimale Hörergebnisse erzielen. Bewegungen von Klangobjekten werden durch mehrere, fest installierte Lautsprecher simuliert; Bewegungen der Hörer*innen, Aufführenden oder der Lautsprecher selbst werden vermieden. Der Ansatz der „Robodynamischen Diffusion / Moving Speakers“ besteht darin, die Lautsprecher von ihrer festgelegten Positionierung zu lösen und die akustischen Reflektionen bewusst in die Wiedergabe miteinzubeziehen, sodass die Audiosignale real im Raum diffundieren. Dafür werden Roboterplattformen eingesetzt, die sich über Programmierung oder Fernsteuerung positionieren und ausrichten lassen. Bei der Navigation der Klangkörper durch den architektonisch gestalteten Raum entstehen akustische Reflexionen und Resonanzen: Schallwellen brechen sich an den baulichen Formen und versetzen die Umgebung in Schwingungen, wodurch das Klangergebnis beeinflusst wird. Somit wird der Aufführungsraum selbst Teil des Instruments und aktiv in die Komposition einbezogen.
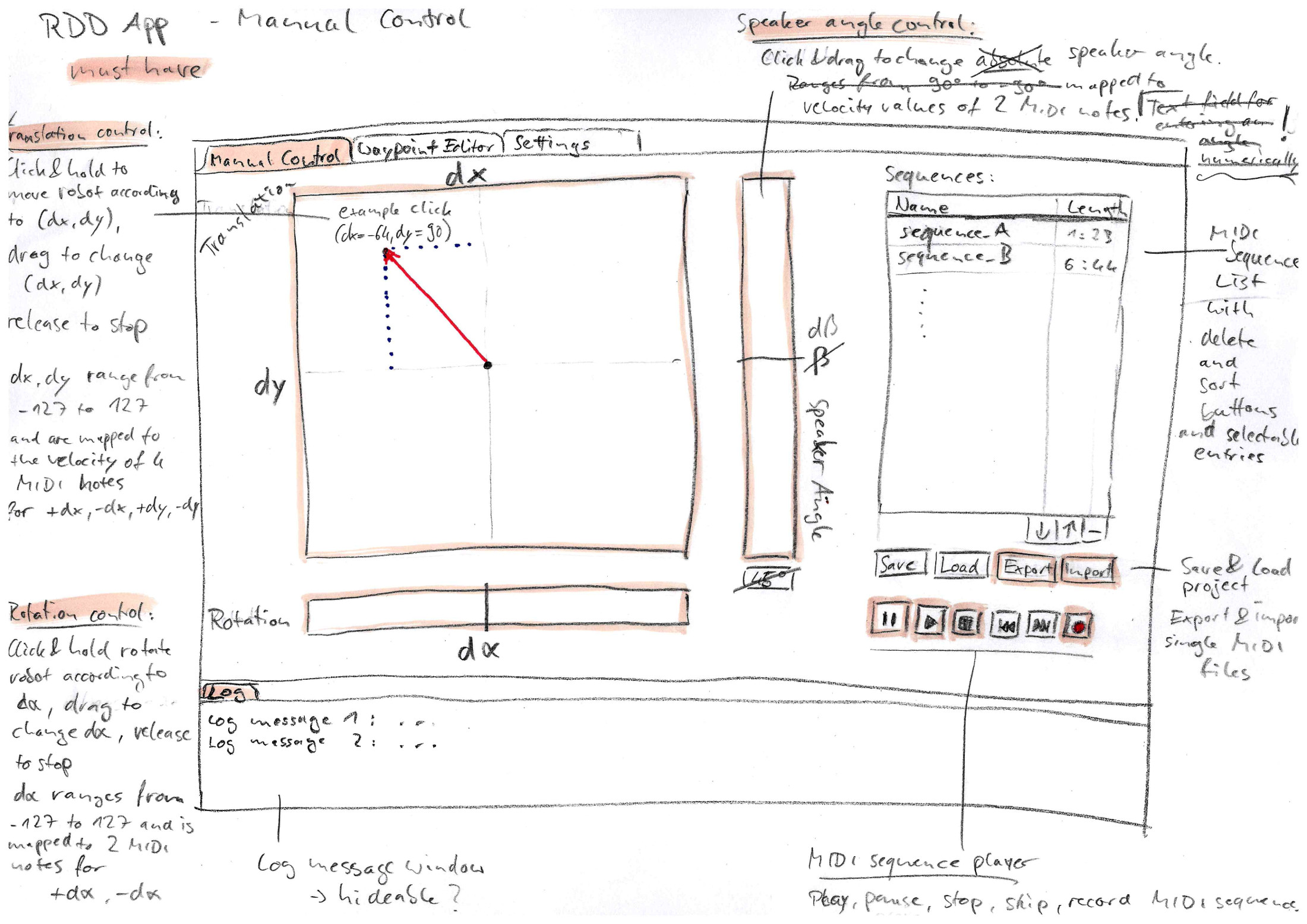
In regelmäßigen Besprechungen und Workshops führen die Projektbeteiligten die bisherigen Ergebnisse ihrer Forschung zusammen und stimmen sie aufeinander ab. Die Entwicklung einer Schnittstelle zwischen Akustik und Robotik ist ein zentraler Bestandteil der Kooperation. Die Ausführung der Roboterbewegungen sollen präzise steuerbar und exakt auf den Sound abstimmbar sein. Die Ausstattung mit einer zusätzlichen Kippvorrichtung ermöglicht eine Feinjustierung der Achse, sodass die Ausrichtung der Soundquelle frei einstellbar ist. In der Werkstatt für Interaktive Medien von Michael Akstaller und Oliver Mayer wurde ein Verfahren geplant, um die Bewegung des Roboters synchron zum Ton zu choreographieren. Im Rahmen ihres Masterstudiums arbeiteten Studenten von Prof. Dr. Stefan May an dieser Verbindung zwischen Roboter und Komposition und programmierten die benötigten Schnittstellen am Roboter. Die Steuerung wurde über eine grafische Oberfläche in die Digital Audio Workstation (DAW) implementiert, sodass die Regelung des Sounds und die Ausrichtung des Roboters parallel bedient werden können. Der Entwicklungsprozess des „Moving Speakers“ von Konzeption über Programmierung bis hin zur technischen Ausführung bedarf genauer Abstimmungen, da die unterschiedlichen Arbeitsschritte unmittelbar ineinandergreifen.



Die mobilen Lautsprecher zu choreographieren, eröffnet neue Möglichkeiten im Bereich der experimentellen und traditionellen Tonwiedergabe – sei es als voll automatisiertes Bühnenstück oder als Raumerkundungsmittel mit Künstlicher Intelligenz. Das Projekt „Robodynamische Diffusion / Moving Speakers“ untersucht anhand des Lautsprechers den Zusammenhang zwischen Raum und Klang und entwickelt ein Instrument, das die Parameter von Musik und deren akustische Wahrnehmung neu befragt.
Projektbeteiligte:
-
Prof. Jan St. Werner
Akademie der Bildenden Künste Nürnberg, Projektklasse Dynamische Akustische Forschung
-
Prof. Stefan May
Technische Hochschule Nürnberg, Fakultät Elektrotechnik, Feinwerktechnik, Informationstechnik, Labor für mobile Robotik
-
Michael Akstaller
Akademie der Bildenden Künste Nürnberg, Projektklasse Dynamische Akustische Forschung
-
Nele Jäger
Akademie der Bildenden Künste Nürnberg, Projektklasse Dynamische Akustische Forschung
-
Oliver Mayer
Akademie der Bildenden Künste Nürnberg, Werkstatt für Interaktive Medien